Introduction
Today, owing to the proliferation of various technologies, the world is witnessing a radical revolution in numerous aspects of daily life (Jeno et al., 2019). In this setting, robots have played a critical role in the world for decades and have increasingly mushroomed to enhance human efficiency in personal and professional life (Engwall et al., 2021). Robots’ uses and applications seem endless, and experts are forging ahead with designing and developing various kinds of robots to be used in diverse areas. The use of robots is rapidly expanding and is no longer limited to engineers or manufacturers. The advent of this cutting-edge technology has opened new doors in a wide range of social, cultural, clinical, and educational areas in different countries around the world, including Iran, a “technologically-savvy country” (Alemi et al., 2014a, p. 1)
In recent years, the Social and Cognitive Research Group at the Center of Excellence in Design, Robotics, and Automation (CEDRA) from Sharif University of Technology in Iran has designed several social robots for different clinical applications, entertainment, as well as educational purposes (e.g., Alemi et al., 2014a; 2014b; 2017; 2020;Meghdari et al., 2018a; 2018b; 2019). In all cases, it was evident that social robots were beneficial and improved the participants’ overall social performance and learning capabilities (see Figures 1 & 2).



To be more specific concrening the education domain, the use of assistive social robots is developing very fast in the world. Moreover, during the past years, social robots have increasingly been used in the field of language pedagogy in Iran (Figure 3). Robots provide a vast host of benefits within the language education domain in which, it seems, RALL will be shortly as pervasive as Computer Assisted Language Learning (CALL) and Mobile Assisted Language Learning (MALL) . Research on the use of social robots is at a relatively nascent stage, and there is still a need for more interdisciplinary or multidisciplinary studies in social robotics (Alemi et al., 2020). Against this backdrop, the present study attempts to contribute to the research on RALL by observing the impact of social assistive humanoid robots in the acquisition and retention of English grammar among young Iranian EFL learners.

Literature Review
The significance of grammar
Grammar is “a set of rules specifying the correct ordering of words at the sentence level” (Nunan, 2003, p. 8). Richards and Rodgers (2001) defined it as “the rules by which words change their forms and are combined into sentences” (p. 705). There has always been a long debate over the necessity and significance of grammar to be taught in second/foreign language classrooms. In this regard, stakeholders posited various views. Although grammar instruction has failed to win the favor of some during the past decades, many researchers (Ellis, 2006; Nunan, 2003) have believed in its significance and viewed it as the basis of the four primary skills in language learning (i.e., listening, speaking, reading, and writing). Grammar is considered an integral part of second language instruction, a lack of which will lead to inefficient language users who cannot communicate effectively (Singh et al., 2017; Wei et al., 2018).
Accordingly, diverse methods and approaches have been proposed to integrate grammar into language education. In many parts of the world, grammar is still taught deductively in teacher-centered classrooms, and the learners are asked to memorize a set of rules. This practice often leads to learners who, despite mastering a variety of grammatical rules, cannot communicate effectively in various sociocultural contexts or are unable to produce new grammatically correct sentences in different situations (Castañeda & Cho, 2016; Liu, 2009). Moreover, a distinction between language use performance (ability to communicate) and language usage competence (mere knowledge of the language)
This situation can be observed in the EFL context of Iran. Like many other Asian countries, many EFL students in Iran still have difficulty producing grammatically correct sentences. This problem may arise from linguistic differences between learners’ mother tongue and English. The decontextualized grammar presentation in the Iranian English textbooks may be another reason since this isolated and meaningless treatment of grammar leads to students who have a good command of the grammatical rules of the language, but who cannot express themselves in a new and realistic situation (Parvin &Yarahmadzehi, 2018). Grammar instruction enables the students to attain linguistic competence (knowledge of the language), so its instruction in EFL classrooms plays a vital role.
Game-based learning
During the past years, many scholars and instructors have turned attention to the use of games to inspire language learners and motivate them to learn more (Hung et al., 2018; Lin et al., 2018). Playing games appear to be one of the basic features of human beings; it can be argued that they trace back to the early history of humanity. Games are also conceived to be an alternative to the old conventional approaches to education which can aid the acquisition of both knowledge and skills (Proske et al., 2014; Van Eck, 2006). Although some may still frown upon games and consider them a waste of time, it seems that games are the best way to make learning a fun activity by raising interest and motivation, as well as fostering a genuine engagement in the students (Denis & Jouvelot, 2005; Hamari et al., 2016; Kim et al., 2018).
Games provide “a high-quality multisensory rendering environment” (Ke et al., 2019, p. 1) which can improve motivation, cognition, and learning (Chen et al., 2019; Connolly et al., 2012; Ke, 2016). Nevertheless, despite this intrinsic connection between games and learning outcomes, games were not common in the education domain in general and language pedagogy in particular until a few decades ago. Abt (1975) first discussed the general idea of using games for educational purposes in his book “Serious Games” and paved the way for their spread into different fields of study.
Games soon found their way into language pedagogy, and different practitioners were interested in using them. For instance, Wright et al. (1984) claimed that “language learning is hard work. Effort is required at every moment and should be maintained over a long period. Games may help and encourage many learners to sustain their interest and work.” (p. 4). It seems that games can do this. Many educators have reported that games can assist learners in language learning. They can distract the learners’ attention from possible difficulty of a task, motivate them to learn more, let them enjoy the learning process, and provide a relaxing and stress-free environment. According to Plass et al. (2020), the main feature of game-based learning is increasing interest. Also, Ke et al. (2019) point out that both learning and games are “challenging, time-intensive, and interactive processes that require cognitive effort and willingness to acquire new knowledge or skills” (p. 1). Learners can monitor and evaluate their improvement through the feedback they receive while playing games (Dempsey et al., 2002; Wouters et al., 2013), which in turn boosts learner autonomy.
Robot-assisted language learning (RALL)
Language instructors and researchers have utilized different procedures and methods to engage learners and expose them to authentic learning material. Although the best possible way appears to be real face-to-face interaction with native speakers of the language, this may be hard to achieve in EFL contexts (for instance, in Iran). During the past years the use of advanced technologies such as computers, mobiles, and tablets has gained momentum and popularity among language educators (Alemi, 2016), and their observed benefits and advantages have revolutionized language instruction.
For a long time, the world was obsessed with CALL and MALL to help learners develop different language skills. Although computers and mobile-based applications seem helpful for language learning, they have some limitations. The most critical drawback is the lack of interactive communication (Purarjomandlangrudi & Chen, 2020), which has caused a shift in attention to other forms of technology to be employed in language pedagogy. It was from the mid-2000s that social robots found their way into the realm of language education, and gradually RALL evolved. Robots are captivating pieces of technology that offer various advantages such as flexibility, repeatability, humanoid appearance, an ability to express emotions, and resultant improved learning outcomes (Kubilinskiene et al., 2017). They also allow the learners to actively participate in the learning process, instead of being passive receivers of knowledge from instructors (Bers, 2008).
Moreover, language education is a social process compared to other technology-assisted language learning types. Robots are perfect partners for communication in language classes (Alemi et al., 2020). In this regard, different advantages of using robots in language instruction have been described in the literature. First and foremost, robots can interact and socialize with the learners and are very efficient in building social relations, a feature almost absent in the other forms of technology used in language instruction (e.g., computers, tablets, or smartphones). Robots are considered great teacher assistants to aid the teacher in teaching. They are intelligent devices that can repeat themselves as often as needed without becoming tired. They are also considered a great source of motivation for the learners by decreasing anxiety levels. Also, their humanoid appearance makes the learners accept them more fully as a natural teacher assistant who can engage the learners in the process of instruction. In addition, robots are flexible and adaptable. Therefore, they can be easily programmed and adjusted based on the learners’ knowledge level, gender, or age (Alemi et al., 2014a; 2017).
A state-of-the-art review of the literature on RALL (Connolly, et al., 2012) shows that robots contribute to more effective language learning. The ability of social robots to teach language skills is well-documented in assisted learning, and common findings suggest that students’ learning gains via RALL are higher, more permanent, and durable than non-RALL approaches. For instance, the study by Alemi et al. (2014a) indicated that RALL had a favorable effect on Iranian young EFL learners’ vocabulary acquisition and retention. RALL studies are not, of course, limited to young learners. In this regard, the study by Engwall and Lopes (2020) indicated that RALL increased interaction and collaboration among 33 adult second language learners.
Regarding reading skills, robots have also proved themselves to be efficient teacher assistants. For example, Hsiao et al’s (2015) study showed improvements in the reading ability and interest of 57 Taiwanese kindergarten children in the presence of a robot. Some studies reported RALL’s positive impact on speaking skills. The study by Wang et al. (2013) showed that employing an educational assistive robot could dramatically increase the bi-directional English language learning of 63 Taiwanese fifth-grade students. The robot as a tangible learning companion positively impacted the learners’ learning motivation, confidence level, and engagement in the lesson. For example, Iio et al. (2019) focused on the impact of RALL on nine female Japanese adult university students, and the pre-and post-tests revealed improvement in their English-speaking skill.
However, few studies have investigated the impact of RALL on the grammatical knowledge of second language learners. For example, Lee et al. (2011) claimed that RALL significantly improved Korean young EFL learners’ grammatical skills. Herberg et al (2015) also reported a generally positive impact of RALL on the grammar acquisition of 33 primary school children from Singapore. To the best of the present researchers’ knowledge, no study has ever examined the impact of RALL on second language learners’ grammar knowledge in the context of Iran. Therefore, the main objective of the current study was to investigate the influence of employing a humanoid assistive social robot in the acquisition and retention of English grammar among young male Iranian EFL learners as measured by their scores on pre-test and immediate and delayed post-tests. To do so, we compared the robot-assisted and game-based language learning strategies as they both seem attractive to the learners and can fully engage them during class activities. Accordingly, students’ performance concerning the acquisition and retention of grammar in the RALL group was compared to the GBLL and control groups. The following research question was put forward:
- Is there any significant difference between RALL, GBLL, and control groups in the acquisition and retention of English grammar among young Iranian EFL learners?
Method
Participants
A total of forty-eight male students, ranging in age between 11 to 15 years old (mean age of 13) from a private English institute in Tehran took part in this study. They were selected based on availability. However, we ensured that all of them were of the same intermediate level of language proficiency and from the same language institute. This selection of participants was related to the notion of robot acceptance. Robots are more freely accepted at this age, and the learners accept them as real counterparts in learning (Engwall et al., 2021). The participants were divided into groups (each with 16 members): the RALL group (See Figure 4), the GBLL group, and the control group. None of these students had seen or interacted with a social robot previously and their first language was Persian. The human teacher taught the students in the RALL group with the help of an assistive social robot through games. In the GBLL group, the human teacher taught the same content through games. In the control group, the students were taught the same content through conventional teacher-centered grammar lessons by the same teacher. It also needs to be noted that informed consent (considering they are minors provided that their faces get blurred) was obtained orally as there is a cultural and political concern with signing documents in Iran.

Instruments
The humanoid robot
A humanoid, social, and programmable robot named NAO H21 (Figure 5), designed and made by Iran (http://www.aldebaran-robotics.com/en-link), was used in this study. In the present study, this kid-sized robot was localized and renamed Nima (an Iranian name for boys) for better and friendlier interaction with children. The robot was programmed for many scenarios and games to be applied in the classroom (see Table 1 for more information on specific features of the robot).
It must be noted that before taking the robot to the actual classroom, it was piloted in the CEDRA laboratory of Sharif University of Technology. This programming was done with the cooperation of engineers of the robotic laboratory session by session before starting each class. Also, it needs to be mentioned that an operator, with a doctorate in robotics from Sharif University of Technology (CEDRA laboratory), joined every class session to support the team and help the group in case of any possible problem. This operator did not play any role in the class activities or teaching.

Table 1: Main features of the humanoid robot

Figure 5. NAO Robot (Nima) H21 version
Choreograph program
The visual graphical programming language used in the Nima robot was Choregraphe (see Figure 6). In order to create the movements and behaviors of the humanoid robot, we used this user-friendly software. New movements and modules were developed alongside the library of pre-established behaviors. Although the Nima robot had assisted the teachers in many games during the lessons, they had to combine many different movements to reach the final desired movement.
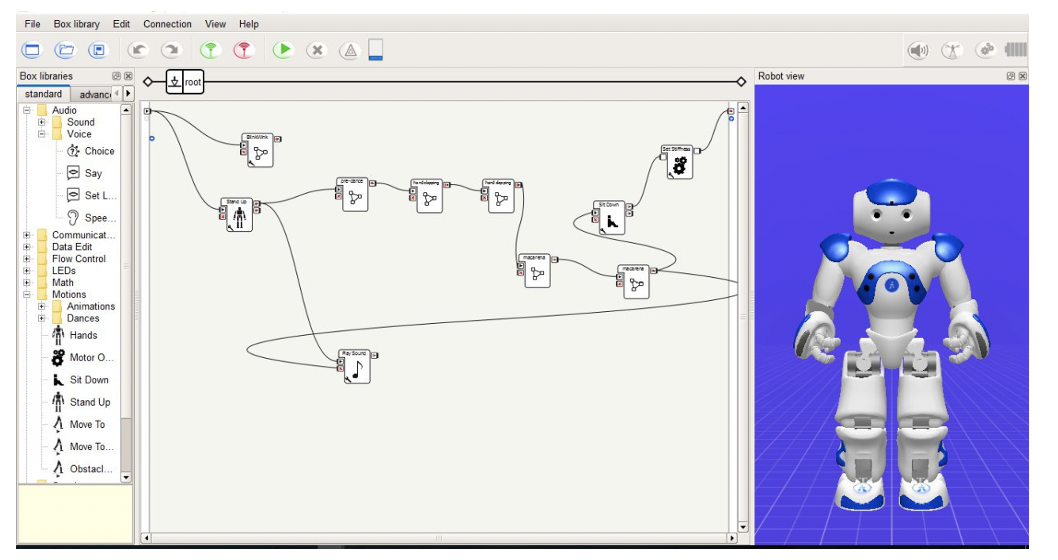
Figure 6: A sample of created action on the Choregraphe program
Sometimes we had to make some modifications, but the movement library was insufficient. Then we had to use Curve Editor, and some moves were edited and fine-tuned in Python scripts. Choregraphe also allowed for adjustments in the pace of talking, pitch, voice, and various sequencing of different movements. It is indeed a great software allowing connection in the macroscopic form of high-level behaviors to effortlessly improve multipart software for this robot by its 25 degrees of freedom. It also provides the capability to fine-tune complex joint or Cartesian motions.
Games
In the present study, games were used both in the RALL (with the help of the Nima robot) and GBLL (only between the teacher and the learners) groups (Figure 7). The games included a board game, hot potato game, game shopping, and verb ball toss, all taken from the ESLgamesplus website (https://www.eslgamesplus.com). The control group, however, did not use any games during instruction, and English grammar was taught deductively through the use of multiple repetitions and drills present in the book or designed by the teacher.

![]()
Pre-test, post-test, and delayed post-test of grammar
The current pre-test, post-test, and control group study investigated the impact of RALL on young EFL learners’ grammar acquisition and retention. The students were randomly assigned to RALL, GBLL, and control groups. At the start of the study, we gave all three groups a 20-item grammar test (Pre-test) based on Hey There 3A. This test could show the basic grammatical knowledge level of the young EFL learners. Later, at the end of the treatment sessions (Session 10), the same test was administered as the immediate post-test. Moreover, two weeks later, the counter-balanced version of the same test was administered as a delayed post-test to investigate the retention of the grammar knowledge of the learners.
Data collection and analysis procedure
The current study is a part of a larger study on the application of social assistive robots in grammar instruction among young EFL learners in Iran. The purpose was to investigate the impact of RALL on students’ grammar acquisition and retention. According to the language institute’s established syllabus, the instructional materials used for all three groups (RALL, GBLL, and control) were precisely the same and based on English Book Hey There 3A. Also, some supplementary materials were downloaded from the ESL library website (https://esllibrary.com) to teach some general grammatical items such as gerund verbs, can/cannot, could/could not, simple past, too much/too many, a few/a little/a lot of, question tags, and should/should not. The lesson plans and scenarios in all three groups were designed based on the aforementioned materials. The difference, however, was in the manner of presentation of the material.
In the RALL group, the treatment was done in the learners’ regular classroom context to make the students feel comfortable. The students enjoyed simultaneous instruction of the human teacher and the assistive robot, accompanied by different games. In the GBLL group, the students were solely taught by the human teacher, and games were utilized to teach different grammatical points. Finally, in the control group, the students were taught based on the conventional teaching method and learned the materials through repetition and different drills. Ten 60-minute sessions were given to the RALL group, fifteen 90-minute sessions to the GBLL group, and fifteen 120-minute sessions to the control group. It is clear that it took the control group the longest time to complete the syllabus. However, the same amount of teaching material took the shortest time to teach the RALL group students.
Regarding the RALL group, we wanted the robot to sound natural and authentic to the students. To do so, different scenarios and lesson plans were separately designed for each class session to create a friendly class environment. It was crucial for the students to freely interact with the robot and consider it a real teacher assistant. Each scenario was pre-programmed and devised with different elements to make the instruction joyful and interactive. There were online interactive conversations between the human teacher, the robot, and the students during class.

Figure 8. Nima robot and teacher encouraging and giving feedback
In general, Nima the robot was scheduled to perform different roles such as gaming, encouraging, noticing, calling students’ names, playing music, dancing, and giving feedback to learners on their correct and wrong answers (Figure 8). The robot soon became a good friend, and the students were very attracted to it. Nima was programmed to call students for different purposes in the class, such as engaging, schemata activation, playing games, keeping noisy students quiet and motivating shy students. It was surprising for the students that the robot knew their names and could call them. The students found this so exciting and enjoyed interacting with the robot. Sometimes Nima the robot gave some hints to naughty students or made fun of them by calling them by name and saying things like: “Be quiet, Pooria (the student’s first name)” or “You are so cute, Alireza (the student’s first name). That is why I love you!”.
One point to be considered is that Nima insisted on playing games with quiet or shy students. The robot called out their names and asked them to play games with him by this noticing action. When the student answered the teacher’s or Nima’s questions correctly during the class instructions, Nima clapped and gave feedback by saying very good or excellent. If not, Nima said, “No, it was not correct,” and gave recasting feedback by providing and modeling the correct answer. Also, Nima made some grammatical mistakes now and then, which ameliorated the class atmosphere by removing stress and anxiety. Nima could save some downloaded music to play for the learners while playing games in the class. The music accompanied Nima’s dance and clapping to attract the learners’ attention and was performed as applause to the winner group when playing games or when the students answered questions correctly. The students enjoyed dancing to the music, which enlivened the class atmosphere. Every time Nima called on students to answer a question, or while playing games, they did their best to answer correctly and get reward of the music and dance.
Results
Before the experiment, RALL, GBLL, and the control group took a pre-test. It was used to gauge participants’ learning and baseline knowledge. Descriptive statistics for the scores of different groups in the pre-test are presented in Table 2.

Table 2: Descriptive statistics of different groups in pre-test (N = 48)
In order to make sure that the three groups did not significantly differ in their pre-test scores, a one-way analysis of variance (ANOVA) was run. The results (F (2, 45) = 0.657, p = .52) indicated that there was not any significant difference between the mean scores of the RALL group (M = 7.75, SD = 2.18), GBLL group (M = 6.94, SD = 2.52), and control group (M = 7.63, SD = 1.71) in the pre-test.
Later, the students took the immediate post-test at the end of the treatments. This immediate post-test was done to measure the learners’ acquisition of grammar after the instructions. As shown in Table 3, the RALL group outperformed the two groups in the immediate post-test with a mean score of M = 19.94 (SD = 0.25). The GBLL group and control group passed this test with a mean score of M = 19.31 (SD = 0.95) and M = 18.94 (SD = 0.85) respectively. As can be seen, the lowest mean score on the immediate post-test was attributed to the control group.

Table 3: Descriptive statistics of different groups in immediate post-test (N = 48)
In the next stage and two weeks after the end of the courses, the students in all groups took the delayed post-test of grammar. This delayed post-test was done to measure the grammar retention range of the three groups. As illustrated in Table 4, the RALL group scored the highest in this test with a mean score value of M = 19.75 (SD = 0.45). Next was the GBLL group, with a mean score of M = 17.81 (SD = 1.28). Finally, the control group was the last, with a mean score value of M = 17.19 (SD = 1.28). The results indicated that the students in the RALL group were the most successful in retention of grammar lessons taught during the course. Figure 9 illustrates the mean scores of the three groups in different tests to describe the findings better.

Table 4: Descriptive statistics of different groups in delayed post-test (N = 48)

Figure 9: Estimated marginal means of different groups in different times
Next, in order to investigate any difference between RALL, GBLL, and control group in the acquisition and retention of English grammar, a two way mixed-design ANOVA was used. More specifically, this ANOVA was used to examine the potential effect of time (a within-subjects independent variable), group (a between-subjects independent variable), and also the interaction effect of time and group, as two independent variables (IV), on students’ English grammar (dependent variable).
At the outset of the analysis in this part, the assumption of univariate normality of ANOVA was investigated. In this regard, all the skewness measures were between -2 and +2, so the assumption of normality was tenable (Tabachnick & Fidell, 2013). Investigating the sphericity assumption that the F-statistic is valid and can be used to determine statistical significance, Mauchly’s test of sphericity (X2 (2) = .46, p = .02) showed that the assumption was not tenable. Because of the volition of sphericity assumption, the Greenhouse-Geisser test, a statistical method of adjusting for lack of sphericity in a repeated measure ANOVA) was performed as recommended by Filed (2013) (See Table 5). Finally, Leven’s test of equality of error variances (tests of the null hypothesis that the error variance of the dependent variable is equal across groups) did not yield any significant results; consequently, this assumption was also satisfied.
Two-way mixed ANOVA revealed that there were time effects (see Table 5), F (1.30, 58.56) = 1214.08, p = .00, partial eta squared of .96, which signaled a large effect, group effect, F (2, 45) = 7.60, p = .01, partial eta squared of .26, which showed a large effect, and finally a time × group interaction effect, F (2.60, 58.56) = 3.90, p = .02, partial eta squared of .15 which also suggests a large effect (Cohen, 1988).

Table 5: Tests of within-subjects effects
Given the existence of the interaction effect, and to answer the research question, it was necessary to investigate this effect in more detail. As an interaction effect is the joint effect of two or more IV (here are time and group) on at least one dependent variable (here grammar knowledge) (Field, 2013; Pituch & Stevens, 2016), the presence of such an effect is significant since it tells us how our two IVs worked together to affect English grammar among Iranian young EFL learners.
As can be seen in Table 6, in the immediate post-test, just RALL (M = 19.94, SD = 0.25) outperformed the control group (M = 18.94, SD = 0.85) (Cohen’s d of 1.60, suggesting a huge effect, Sawilowsky, 2009), whereas it did not outdo GBLL. Moreover, as it was found that there was no significant difference between the GBLL group and control group, we can conclude that RALL outperformed the GBLL and control group in advancing the students’ acquisition of grammar. In the delayed posttest, RALL (M = 19.75, SD = 0.45) outperformed both GBLL (M = 17.81, SD = 1.28) and the control group (M = 17.19, SD = 1.28). No significant difference was found between the performance of the GBLL group and the control group at the testing time. It is to be noted that, although all the groups had some attrition across time, the attrition for RALL was the smallest, and, as Bonferroni revealed, was statistically significant (see Table 6 and Figure 9 above).

Table 6: Pairwise Bonferroni comparisons in different testing times
Discussion
The purpose of the present study was to investigate the impact of utilizing an assistive social robot in the acquisition and retention of English grammar among young Iranian EFL learners. The results indicated that RALL was very effective and could increase the learners’ overall acquisition and retention of grammar. Improvement in the acquisition of grammar in the RALL group might be attributable to the robot’s anthropomorphization by the young learners who conceived of it as a “co-learner or a playmate” (Kim & Tscholl, 2021, p. 2). However, the robot was not considered just a toy, but rather a real assistant teacher who supported the students while learning. The equally good results of the learners in the RALL group in the delayed post-test could be attributed to the theory of embodied cognition, which mainly posits that one’s cognitive function and perceptual processes are closely tangled with the body and physical interactions with the environment (Costello & Bloesch, 2017). It is postulated that the various physical and social interactions that the learners in the current study had with the Nima robot during the learning process led to a noticeably higher engagement level which finally caused a better acquisition and retention of grammar. As Glenberg (2010) noted, the main drawback of the conventional teaching methods is this lack of deep engagement. The students in the RALL group enjoyed learning, had fun interacting with the robot, and were actively involved in the games played during the class. These all may have led to the higher grammar acquisition and retention rates among the RALL group learners.
The results of the current study also showed some improvements in the GBLL group. It seems that the existence of competition among the students and their engagement during games could have improved the students’ “flow experience” (Sitzmann, 2011; Tennyson & Jorczak, 2008), defined as “the ultimate outcome of deep engagement” (Chen et al., 2019, p. 1008) while playing games. Their motivation increased because of their sense of competition while playing the games, and tthis engaged them more in learning. Moreover, games could have improved the learners’ positive emotions and made grammar instruction easier. That may explain the improved performance of the students in the immediate post-test compared to the pre-test. This finding is aligned with Clark et al. (2011) and Erhel and Jamet (2013), who also reported the positive impact of game-based learning.
Our findings, however, are not in line with Cagiltay et al. (2015), who reported that the presence of competition in a game-based language learning context did not exert any significant effect on learning. Similarly, Chen et al. (2018) also reported that game-based learning did not significantly affect the learners’ performance and learning outcome. They argued that students who compete in games while learning tend to focus more on performance. Therefore in a non-competition environment the main focus is on learning, which may affect the final scores and performance.
In addition, although the students in the GBLL group scored higher on the immediate post-test, they did not perform very well on the delayed post-test, which can be a sign of a lack of genuine mastery and understanding of the content. From the results of the present study, it can be contended that the feeling of competition experienced during playing the games may have prevented the students from focusing on the content of the lessons to be learned, which may have influenced the internalization process and retention of grammar. In fact, it seems that games were some kind of distractor to the students’ long-term retention of grammar in the long run. Some previous studies further confirmed this (e.g., Chen et al., 2018; Cheng et al., 2009; ter Vrugte et al., 2015). In this regard, teachers should help students to gain more from the games played in educational contexts by not having a mere focus on winning the game (Chen et al., 2019).
Regarding the control group in this study, their classes mainly revolved around a didactic triangle (Kansanen, 1999) comprised of the teacher, the learner, and the content to be taught. Learning occurred as a result of the interaction among these three constituents. In the present study, content refers to English grammar, and it seems that the teacher taught it based on her own teaching experience and qualification, interest, concerns, and general professional views and skills concerning instruction. Accordingly, the learners construed the content of the lesson according to their own beliefs, previous experiences, interests, and intellectual skills (Jean & Simard, 2011). In any case, great care needed to be taken to avoid rote learning and encourage meaningful learning of grammar among the students, which was simultaneously engaging, enjoyable, and motivating.
However, based on the results of the current study, it can be concluded that the lessons and the teaching procedure in the control group were less effective in the retention of grammatical knowledge than in the GBLL and RALL group. Although the learners scored relatively better in the immediate post-test, their scores decreased greatly in the delayed post-test. This can suggest that the lessons could not motivate and engage the learners adequately, leading to a great loss in the retention of the content. Just like the 2321 Canadian students in Jean and Simard’s (2011) study, Iranian students in general and the participants in the current study may have also regarded grammar to be a boring subject. Therefore, it is advised that grammar should be taught more cautiously, as most of the students have a negative attitude toward grammar.
Overall, the observed privilege of the RALL system in the acquisition and retention of grammar in this study can be grounded in different pre-established theories. First of all, based on Schmidt’s (1990) noticing theory, one cannot underestimate the role of noticing and real attention and involvement in learning. Also, in line with Swain’s (1985) output hypothesis, no matter how much comprehensible input the learners are exposed to, they need to produce the language to master the knowledge. The robot invited the learners in the RALL group to take a more active role in the class, produce sentences, and respond to the Nima robot’s questions. Due to higher levels of interest and positive attitudes of the learners toward the robot, documented in the follow-up study, there was more evidence of collaborative learning in the RALL group. The learners were highly motivated and encouraged to participate in-class activities.
Another point worth mentioning is the duration of classes and the learning speed of the different participant groups. The results showed that the instruction time was the least in the RALL group. The RALL group covered the same content in only ten 60-minute-sessions, whereas the GBLL and control groups learned the same amount of material in fifteen 90-minute and 120-minute-sessions, respectively. This is roughly 1.5 times as much as the RALL group. This is in line with some previous studies, like Alemi et al. (2014a), who also found that RALL could facilitate the speed of learning English vocabulary among young Iranian EFL learners. Also, in the RALL group, it was observed that the students found the robot very intriging, which could have dramatically decreased anxiety levels; they managed to internalize the lessons much better than the other two groups and received higher scores in the delayed post-tests, which is a sign of superior retention of learned content. This is considered a further evidence of the possible double effect of RALL, as the students learned more and faster.
The Nima robot was able to enhance the positive interrelationships between the teacher and the students. There were many cases where the students excitedly went to the teacher to tell her about the robot and its abilities. As Engwall and Lopes (2020) argue, this fact is fundamental and lies in the social abilities of the robot. We argue that the main advantage of RALL is that this interest and excitement in robots observed in the learners are supposed to be sustainable through the coming years, just as dolls are loved toys around the world and have been loved by children for centuries. Needless to say that with annual advancements in technology, robots will also improve and be equipped with newer capabilities and features to satisfy newer needs.
Conclusion
Technology-enhanced second language learning has gained momentum during the past years, and diverse sorts of technology were introduced at an unprecedented pace into the domain of language pedagogy. Numerous studies have also been conducted to investigate these different technologies’ efficiency. The significant contribution of the present study to this ever-expanding literature was demonstrating the apparent effectiveness of human-robot interaction in teaching basic linguistic skills among second language learners in the Iranian EFL context. The obtained results revealed that the Nima robot seemed to be a true success in the successful acquisition and retention of English grammar among young EFL learners.
Language students generally do not enjoy learning grammar, so its instruction needs to be as enjoyable and interactive as possible. A lot has been done in this regard over the past few decades and new educational possibilities have been brought up to different contexts due to the observed advancements in technology (Reynolds & Anderson, 2015; Shadiev, et al., 2018). In light of the current study, we would like to conclude that the use of humanoid social robots could be a valuable tool to improve the learning outcomes among young learners by providing an engaging and thrilling class atmosphere. This is important since globalization has resulted in a growing need of learning English in Iran, as well as the rest of the world (Kusumaningputri & Widodo, 2018). More importantly, in a context where most students prefer learning the language as fast as possible and without any loss, RALL can be a very appropriate alternative needing more attention by policymakers and language practitioners. Research has suggested that robots can increase learning motivation, decrease learners’ anxiety, assist teachers in successfully presenting teaching materials, as they contribute to higher acquisition and retention of content. Therefore, they can be recommended to be implemented more broadly in language classrooms.
Concerning future areas of research, it needs to be pointed out that the vitally important role of RALL in adults’ education is, to some extent, overlooked. We recommend that future research investigate the impact and efficiency of using robots in different educational situations with adult students.
References
Abt, C. C. (1975). Serious games. Viking Compass.
Alemi, M. (2016). General impacts of integrating advanced and modern technologies on teaching English as a foreign language. International Journal on Integrating Technology in Education, 5(1), 13-25. https://aircconline.com/ijite/V5N1/5116ijite02.pdf
Alemi, M., & Bahramipour, S. (2019). An innovative approach of incorporating a humanoid robot into teaching EFL learners with intellectual disabilities. Asian-Pacific Journal of Second and Foreign Language Education, 4(1). https://doi.org/10.1186/s40862-019-0075-5
Alemi, M., Meghdari, A., & Ghazisaedy, M. (2014a). Employing humanoid robots for teaching English language in Iranian junior high-schools. International Journal of Humanoid Robotics, 11(3). https://doi.org/10.1142/S0219843614500224
Alemi, M., Meghdari, A., Ghanbarzadeh, A., Moghaddam, L. J., & Ghanbarzadeh, A. (2014b). Impact of a social humanoid robot as a therapy assistant in children cancer treatment. In M. Beetz, B. Johnston, M.-A. Williams (Eds.), Social Robotics, 6th International Conference, ICSR, October 27-29, Sydney, Austalia (pp. 11-22). Springer.
Alemi, M., Meghdari, A., & Haeri, N. S. (2017). Young EFL learners’ attitude towards RALL: An observational study focusing on motivation, anxiety, and interaction. In A. Kheddar, E. Yoshida, S. S. Ge, K. Suzuki, J.-J. Cabibihan, F. Eyssel, & H., Hongsheng (Eds.) 9thInternational Conference, ICSR, November 22-24, Tsukuba, Japan. https://doi.org/10.1007/978-3-319-70022-9_25
Alemi, M., Taheri, A., Shariati, A., & Meghdari, A. (2020). Social robotics, education, and religion in the Islamic world: An Iranian perspective. Science and Engineering Ethics, 26(5), 2709-2734. https://doi.org/10.1007/s11948-020-00225-1
Bers, M. U. (2008). Blocks to robots: Learning with technology in the early childhood classroom. Teachers College Press.
Cagiltay, N. E., Ozcelik, E., & Ozcelik, N. S. (2015). The effect of competition on learning in games. Computers & Education, 87, 35-41. https://doi.org/10.1016/j.compedu.2015.04.001
Castañeda, D. A., & Cho, M.-H. (2016). Use of a game-like application on a mobile device to improve accuracy in conjugating Spanish verbs. Computer Assisted Language Learning, 29(7), 1195-1204. https://doi.org/10.1080/09588221.2016.1197950
Chen, C.-H., Law, V., & Chen, W.-Y. (2018). The effects of peer competition-based science learning game on secondary students’ performance, achievement goals, and perceived ability. Interactive Learning Environments, 26(2), 235-244. https://doi.org/10.1080/10494820.2017.1300776
Chen, C.-H., Law, V., & Huang, K. (2019). The roles of engagement and competition on learner’s performance and motivation in game-based science learning. Educational Technology Research and Development, 67(4), 1003-1024. https://doi.org/10.1007/s11423-019-09670-7
Cheng, H. N. H., Wu, W. M. C., Liao, C. C. Y., & Chan, T.-W. (2009). Equal opportunity tactic: Redesigning and applying competition games in classrooms. Computers & Education, 53(3), 866-876. https://doi.org/10.1016/j.compedu.2009.05.006
Clark, D. B., Nelson, B. C., Chang, H.-Y., Martinez-Garza, M., Slack, K., & D’Angelo, C. M. (2011). Exploring Newtonian mechanics in a conceptually-integrated digital game: Comparison of learning and affective outcomes for students in Taiwan and the United States. Computers & Education, 57(3), 2178-2195. https://doi.org/10.1016/j.compedu.2011.05.007
Cohen, J. (1988). Statistical power analysis for the behavioral sciences (2nd ed.). Lawrence Erlbaum Associates.
Connolly, T. M., Boyle, E. A., MacArthur, E., Hainey, T., & Boyle, J. M. (2012). A systematic literature review of empirical evidence on computer games and serious games. Computers & Education, 59(2), 661-686. https://doi.org/10.1016/j.compedu.2012.03.004
Costello, M. C., & Bloesch, E. K. (2017). Are older adults less embodied? A review of age effects through the lens of embodied cognition. Frontiers in Psychology, 8. https://doi.org/10.3389/fpsyg.2017.00267
Dempsey, J. V., Haynes, L. L., Lucassen, B. A., & Casey, M. S. (2002). Forty simple computer games and what they could mean to educators. Simulation & Gaming, 33(2), 157-168. https://doi.org/10.1177/1046878102332003
Denis, G., & Jouvelot, P. (2005). Motivation-driven educational game design: Applying best practices to music education. In Proceedings of the 2005 ACM SIGCHI International Conference on Advances in computer entertainment technology. (pp. 462-465).
Ellis, R. (2006). Current issues in the teaching of grammar: An SLA perspective. TESOL Quarterly, 40(1), 83-107.http://dx.doi.org/10.2307/40264512
Engwall, O., & Lopes, J. (2020). Interaction and collaboration in robot-assisted language learning for adults. Computer Assisted Language Learning, 35(5-6). https://doi.org/10.1080/09588221.2020.1799821
Engwall, O., Lopes, J., & Åhlund, A. (2021). Robot interaction styles for conversation practice in second language learning. International Journal of Social Robotics, 13(2), 251-276. https://doi.org/10.1007/s12369-020-00635-y
Erhel, S., & Jamet, E. (2013). Digital game-based learning: Impact of instructions and feedback on motivation and learning effectiveness. Computers & Education, 67, 156-167. https://doi.org/10.1016/j.compedu.2013.02.019
Field, A. (2013). Discovering statistics using SPSS (4th ed.). SAGE.
Glenberg, A. M. (2010). Embodiment as a unifying perspective for psychology. Wiley Interdisciplinary Reviews: Cognitive Science, 1, 586-596. https://doi.org/10.1002/wcs.55
Hamari, J., Shernof, D. J., Rowe, E., Coller, B., Asbell-Clarke, J., & Edwards, T. (2016). Challenging games help students learn: An empirical study on engagement, flow and immersion in game-based learning. Computers in Human Behaviour, 54, 170-179. https://doi.org/10.1016/j.chb.2015.07.045
Herberg, J. S., Feller, S., Yengin, I., & Saerbeck, M. (2015). Robot watchfulness hinders learning performance. 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) 31 August, Kobe, Japan (pp. 153-160) IEEE. https://doi.org/10.1109/ROMAN.2015.7333620
Hsiao, H.-S., Chang, C.-S., Lin, C.-Y., & Hsu, H.-L. (2015). “iRobiQ”: The influence of bidirectional interaction on kindergarteners’ reading motivation, literacy, and behavior. Interactive Learning Environments, 23(3), 269-292. https://doi.org/10.1080/10494820.2012.745435
Hung, H.-T., Yang, J- C., Hwang, G.-J., Chu, H.-C., & Wang, C.-C. (2018). A scoping review of research on digital game-based language learning. Computers & Education, 126, 89-104. https://doi.org/10.1016/j.compedu.2018.07.001
Iio, T., Maeda, R., Ogawa, K., Yoshikawa, Y., Ishiguro, H., Suzuki, K., Aoki, T., Maesaki, M., & Hama, M. (2019). Improvement of Japanese adults’ English speaking skills via experiences speaking to a robot. Journal of Computer Assisted Learning, 35(2), 228-245. https://doi.org/10.1111/jcal.12325
Jean, G., & Simard, D. (2011). Grammar teaching and learning in L2: Necessary, but boring?. Foreign language annals, 44(3), 467-494. https://doi.org/10.1111/j.1944-9720.2011.01143.x
Jeno, L. M., Vandvik, V., Eliassen, S., & Grytnes, J.-A. (2019). Testing the novelty effect of an m-learning tool on internalization and achievement: A self-determination theory approach. Computers & Education, 128, 398-413. https://doi.org/10.1016/j.compedu.2018.10.008
Kansanen, P. (1999). Teaching as teaching-studying-learning interaction. Scandinavian Journal of Educational Research, 43(1), 81-89. https://doi.org/10.1080/0031383990430105
Ke, F. (2016). Designing and integrating purposeful learning in game play: A systematic review. Educational Technology Research and Development, 64(2), 219-244. https://doi.org/10.1007/s11423-015-9418-1
Ke, F., Shute, V., Clark, K. M., & Erlebacher, G. (2019). Interdisciplinary design of game-based learning platforms: A phenomenological examination of the integrative design of game, learning, and assessment. Springer.
Kim, S., Song, K., Lockee, B., & Burton, J. (2018). Engagement and fun. In K. Sangkyun, K. Song, B. Lockee, & J. Burton (Eds.). Gamification in learning and education: Enjoy learning like gaming (pp. 7-14). Springer.
Kim, Y., & Tscholl, M. (2021). Young children’s embodied interactions with a social robot. Educational Technology Research and Development, 69, 2059-2081. https://doi.org/10.1007/s11423-021-09978-3
Kubilinskiene, S., Zilinskiene, I., Dagiene, V., & Sinkevičius, V. (2017). Applying robotics in school education: A systematic review. Baltic Journal of Modern Computing, 5(1), 50-69. https://doi.org/10.22364/bjmc.2017.5.1.04
Kusumaningputri, R., & Widodo, H. P. (2018). Promoting Indonesian university students’ critical intercultural awareness in tertiary EAL classrooms: The use of digital photograph-mediated intercultural tasks. System, 72, 49-61. https://doi.org/10.1016/j.system.2017.10.003
Lee, S., Noh, H., Lee, J., Lee, K., Lee, G. G., Sagong, S., & Kim, M. (2011). On the effectiveness of robot-assisted language learning. ReCALL, 23(1), 23-58. https://doi.org/10.1017/S0958344010000273
Lin, C.-J., Hwang, G- J., Fu, Q.-K., & Chen, J.-F. (2018). A flipped contextual game-based learning approach to enhancing EFL students’ English business writing performance and reflective behaviors. Educational Technology & Society, 21(3), 117-131. https://www.jstor.org/stable/26458512
Liu, T.-Y. (2009). A context-aware ubiquitous learning environment for language listening and speaking. Journal of Computer Assisted Learning, 25(6), 515-527. https://doi.org/10.1111/j.1365-2729.2009.00329.x
Meghdari, A., & Alemi, M. (2018). Recent advances in social & cognitive robotics and imminent ethical challenges. Proceedings of the 10thInternational RAIS Conference on Social Sciences and Humanities, Princeton University. Atlantis Press. https://dx.doi.org/10.2139/ssrn.3266627
Meghdari, A., Alemi, M., Zakipour, M., & Kashanian, S. A. (2019). Design and realization of a sign language educational humanoid robot. Journal of Intelligent and Robotic Systems, 95(1), 3-17. https://doi.org/10.1007/s10846-018-0860-2
Meghdari, A., Shariati, A., Alemi, M., Amoozandeh, A., Khamooshi, M., & Mozafari, B. (2018a). Design performance characteristics of a social robot companion “Arash” for pediatric hospitals. International Journal of Humanoid Robotics, 15(5), 1850019. https://doi.org/10.1142/S0219843618500196
Meghdari, A., Shariati, A., Alemi, M., Vossoughi, G. R., Eydi, A., Ahmadi, E., Mozafari, B., Amoozandeh Nobaveh, A., & Tahami, R. (2018b). Arash: A social robot buddy to support children with cancer in a hospital environment. Proceedings of the Institution of Mechanical Engineers. Part H, Journal of Engineering in Medicine, 232(6), 605-618. https://doi.org/10.1177/0954411918777
Nunan, D. (2003). Practical English language teaching: Grammar. McGraw-Hill.
Parvin, M., & Yarahmadzehi, N. (2018). The effects of game-based learning on the grammatical accuracy of Iranian high school students. Iranian Journal of English for Academic Purposes, 6(1), 31-46. https://dorl.net/dor/20.1001.1.24763187.2017.6.1.3.9
Pituch, K. A., & Stevens, J. P. (2016). Applied multivariate statistics for social sciences (6th ed.). Routledge.
Plass, J. L., Mayer, R. E., & Homer, B. D. (2020). Handbook of game-based learning. MIT Press.
Proske, A., Roscoe, R. D., & McNamara, D. S. (2014). Game-based practice versus traditional practice in computer-based writing strategy training: Effects on motivation and achievement. Educational Technology Research and Development, 62(5), 481-505. https://doi.org/10.1007/s11423-014-9349-2
Purarjomandlangrudi, A., & Chen, D. (2020). Exploring the influence of learners’ personal traits and perceived course characteristics on online interaction and engagement. Educational Technology Research and Development, 68(5), 2635-2657. https://doi.org/10.1007/s11423-020-09792-3
Reynolds, B. L., & Anderson, T. A. F. (2015). Extra-dimensional in-class communications: Action research exploring text chat support of face-to-face writing. Computers and Composition, 35, 52-64. https://doi.org/10.1016/j.compcom.2014.12.002
Richards, J. C., & Rodgers, T. (2001). Approaches and methods in language teaching. Cambridge University Press.
Sawilowsky, S. S. (2009). New effect size rules of thumb. Journal of Modern Applied Statistical Methods, 8(2), 467-474. https://doi.org/10.22237/jmasm/1257035100
Shadiev, R., Hwang, W.-Y., Huang, Y.-M., & Liu, T.-Y. (2018). Facilitating application of language skills in authentic environments with a mobile learning system. Journal of Computer Assisted Learning, 34(1), 42-52. https://doi.org/10.1111/jcal.12212
Schmidt, R. W. (1990). The role of consciousness in second language learning. Applied Linguistics, 11(2), 129-158. https://doi.org/10.1093/applin/11.2.129
Singh, C., Singh, A. K. J., Razak, N. Q. A., & Ravinthar, T. (2017). Grammar errors made by ESL tertiary students in writing. English Language Teaching, 10(5), 16-27. https://doi.org/10.5539/elt.v10n5p16
Sitzmann, T. (2011). A meta-analytic examination of the instructional effectiveness of computer-based simulation games. Personnel Psychology, 64, 489-528. https://doi.org/10.1111/j.1744-6570.2011.01190.x
Swain, M. (1985). Communicative competence: Some roles of comprehensible input and comprehensible output in its development. In S. Gass & C. Madden (Eds.), Input second language acquisition (pp. 235-253). Newbury House.
Tabachnick, B. G., & Fidell, L. S. (2013). Using multivariate statistics (6th ed.). Allyn and Bacon.
Tennyson, R. D., & Jorczak, R. L. (2008). A conceptual framework for the empirical study of games. In H. O’Neil & R. S. Perez (Eds.), Computer games and team and individual learning (pp. 3-20). Erlbaum.
ter Vrugte, J., de Jong, T., Vandercruysse, S., Wouters, P., van Oostendorp, H., & Elen, J. (2015). How competition and heterogeneous collaboration interact in prevocational game-based mathematics education. Computers & Education, 89, 42-52. https://doi.org/10.1016/j.compedu.2015.08.010
Van Eck, R. (2006). Digital game-based learning: It’s not just the digital natives who are restless. EDU-CAUSE Review, 41(2), 16-30. https://er.educause.edu/-/media/files/article-downloads/erm0620.pdf
Wang, Y. H., Young, S. S.-C., & Jang, J.-S. R. (2013). Using tangible companions for enhancing learning English conversation. Journal of Educational Technology and Society, 16(2), 296-309. https://www.jstor.org/stable/10.2307/jeductechsoci.16.2.296
Wei, C.-W., Kao, H.-Y., Lu, H.-H., & Liu, Y. C. (2018). The effects of competitive gaming scenarios and personalized assistance strategies on English vocabulary learning. Journal of Educational Technology and Society, 21(3), 146-158. https://www.jstor.org/stable/26458514
Wouters, P., Van Nimwegen, C., van Oostendorp, H., & van der Spek, E. D. (2013). A meta-analysis of the cognitive and motivational effects of serious games. Journal of Educational Psychology, 105(2), 249-265. https://doi.org/10.1037/a0031311
Wright, A., Betteridge, D., & Buckby, M. (1984). Games for language learning. Cambridge University Press.
